DCitizens
We investigate how technology can empower citizens and non-state actors to take an active role in shaping agendas.

DC LGP
DCLGP aims to build a digital bilingual sign language dictionary with a feature-based search engine that allows people to form visual queries for unfamiliar signs.
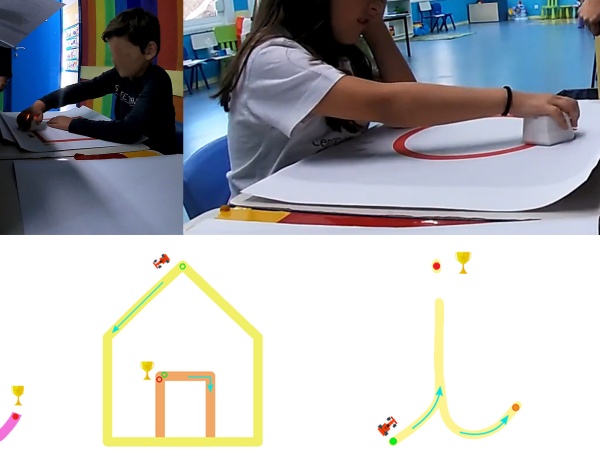
Inclusive Computational Thinking
We investigate the use of tangible systems to promote computational thinking skills in mixed-ability children.
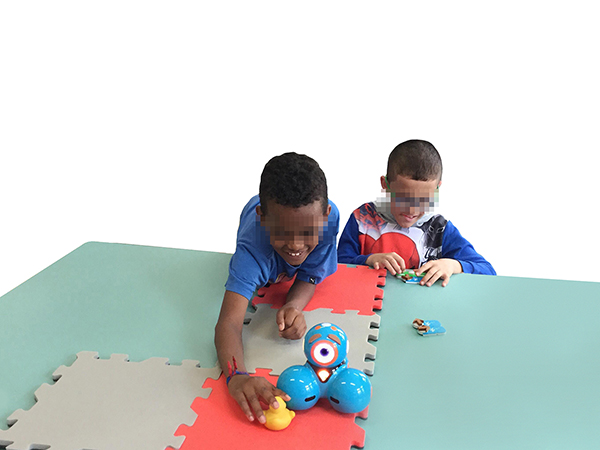
Social Robots in Inclusive Classrooms
We investigate the use of social robots to create inclusive mix-visual ability classrooms.
AVATAR
AVATAR proposes creating a signing 3D avatar able to synthesize Portuguese Sign Language.

Games for Inclusion
We explore how to create inclusive environments and behaviours with and through games.

ARCADE
ARCADE proposes leveraging interactive and digital technologies to create context-aware workspaces to improve physical rehabilitation practices.

Accessibility in the Wild
In this project, we are creating the tools to characterize user performance in the wild and improve current everyday devices and interfaces.

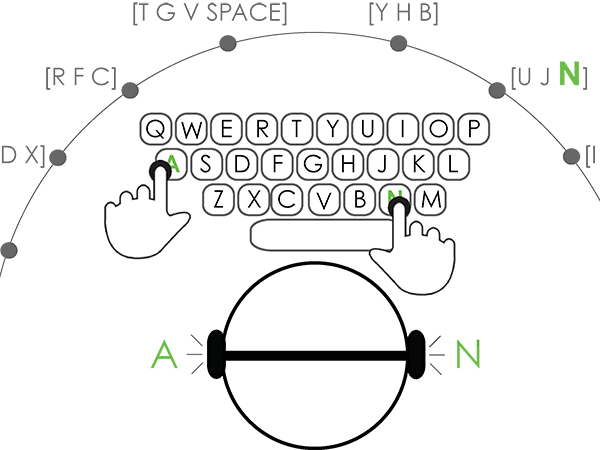
Non-visual Mobile Text-Entry
We are creating novel non-visual input methods to multiple form-factors: from tablets to smartwatches.

Multi-point Vibrotactile Feedback
As touchscreens have evolved to provide multitouch capabilities, we are exploring new multi-point feedback solutions.
Applications for Concurrent Speech
In this research work, we are investigating novel interactive applications that leverage the use of concurrent speech to improve users' experiences.
Nonvisual Word Completion
We investigate novel interfaces and interaction techniques for nonvisual word completion. We are particularly interested in quantifying the benefits and costs of such new solutions.

Motor-Impaired and Touchscreens
Our goal is to thoroughly study mobile touchscreen interfaces, their characteristics and parameterizations, thus providing the tools for informed interface design.

Accessible Classrooms
This research leverages mobile and wearable technologies to improve classroom accessibility for Deaf and Hard of Hearing college students.

Disabled 'R' All
We aim to understand the overlap of problems faced by health and situational impaired users when using their mobile devices and design solutions for both user groups.