
Ao longo deste primeiro semestre, na cadeira de Portefólio Meec, aprendemos a trabalhar com o NXT. Realizados todos os laboratórios chegou finalmente a altura de fazer o nosso projecto!
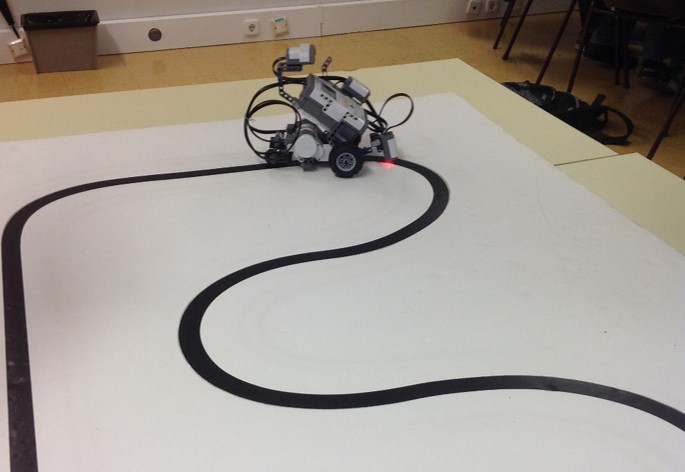
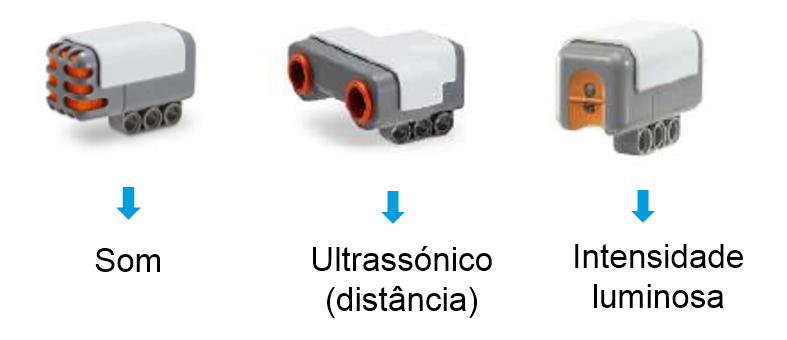
O principal objectivo foi fazer com que o robot seguisse uma linha preta e reagisse a vários estímulos ao longo de um percurso, utilizando para isto 3 dos seus sensores: Ultrassónico, de luz e de som.
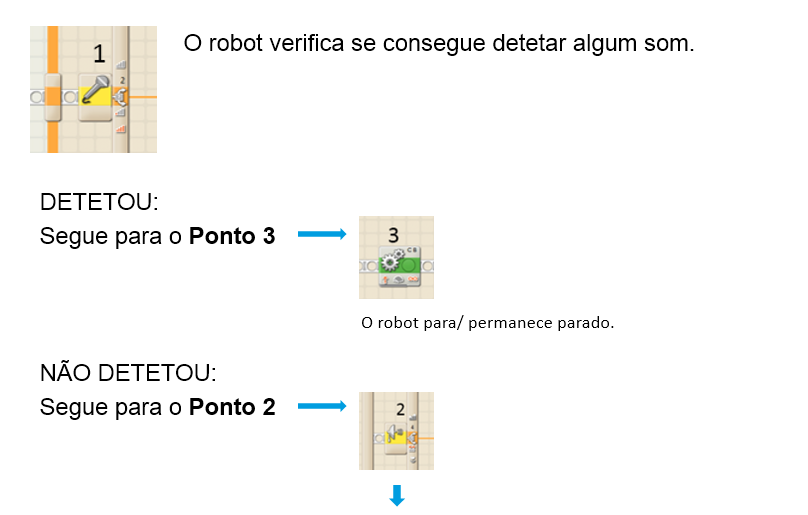
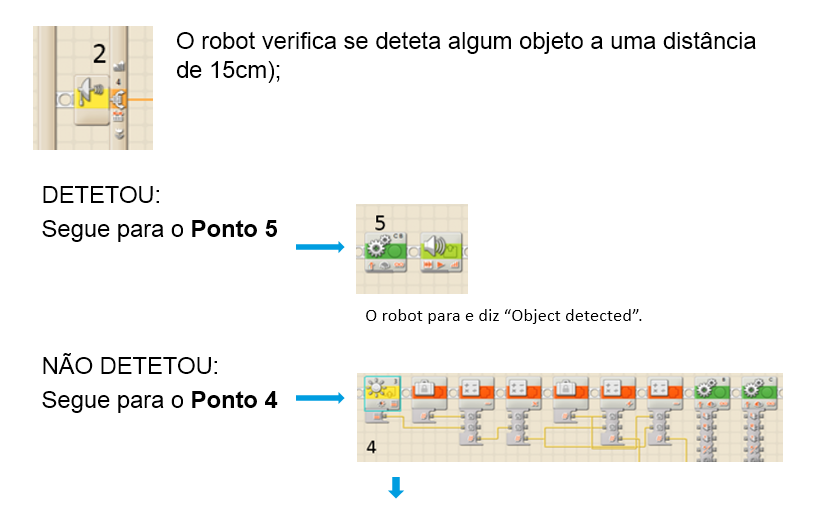
O robot NXT espera então 2 segundos até iniciar o andamento. Pára quando e enquanto ouvir um barulho ou caso detecte um objecto a uma distância de 15 cm e volta a andar quando este for retirado.
Para tal foi criado um programa no NXT 2.1 Programming.
O PROGRAMA
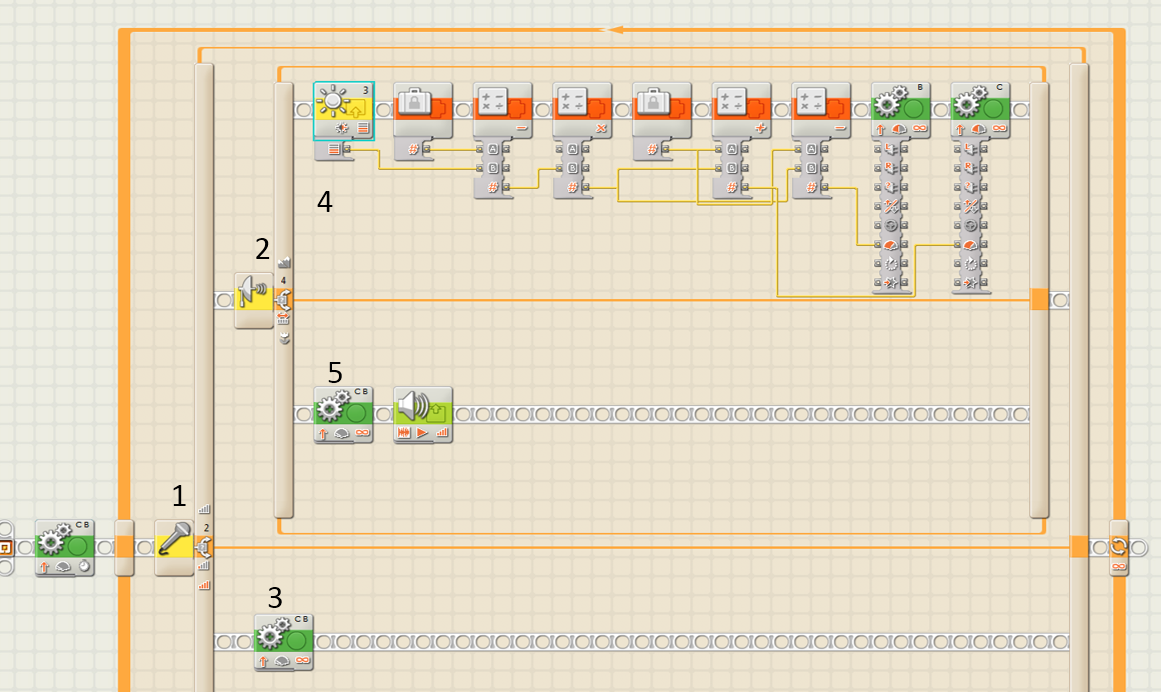
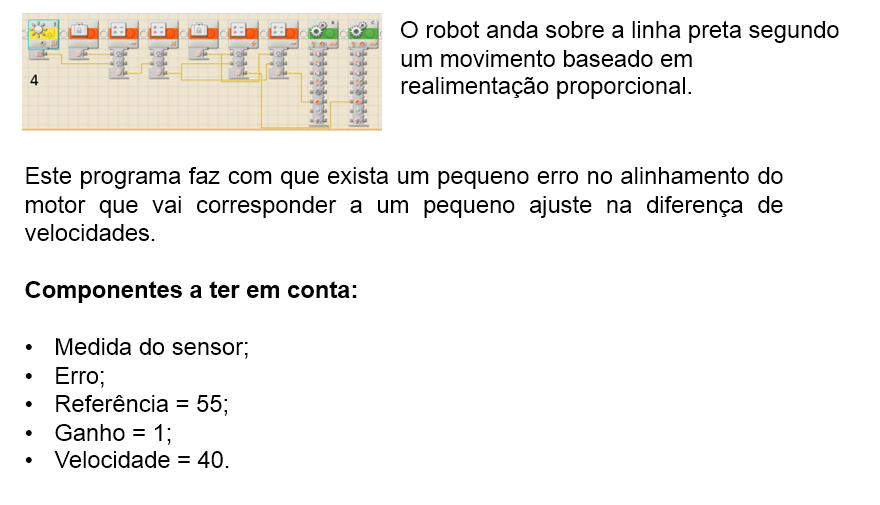
Este programa foi criado para que o NXT conseguisse dar uso a todos os seus sensores (disponíveis no laboratório) e, assim, conseguir interagir de uma forma mais dinâmica com o meio exterior.
PROVA FINAL
Como foi possível ver no vídeo acima, o projecto obteve um resultado bastante positivo na fase de testes, visto que fez exactamente o que era esperado tendo em conta o programa criado.
Esta experiência permitiu-nos, mais uma vez, ter a oportunidade de explorar as diversas capacidades deste incrível robot da Lego, o NXT.